

RadarDetect
分类:C++
做一个雷达探测的模型,输入数据是通过采样得到的,类似于下图:
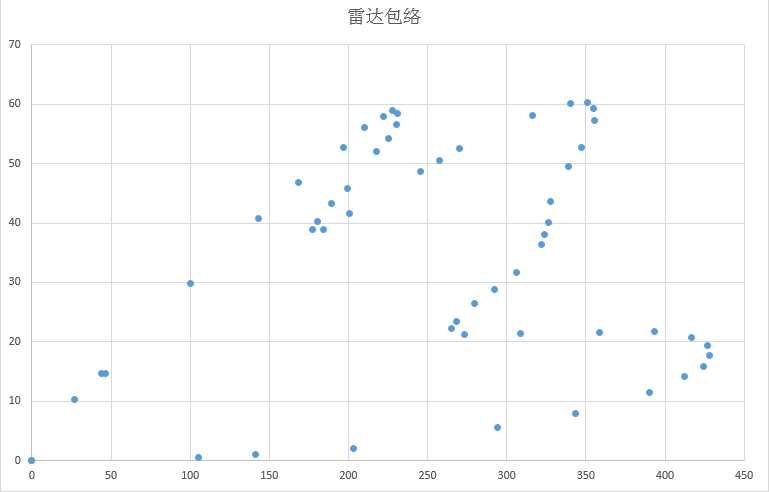 目前只考虑雷达包络范围探测,不考虑目标截面对雷达回波的影响。主要分为雷达模型探测后端部分和前端绘制部分。
目前只考虑雷达包络范围探测,不考虑目标截面对雷达回波的影响。主要分为雷达模型探测后端部分和前端绘制部分。
1. 雷达探测
直角坐标与极坐标转换
虽然提供的探测点是基于直角坐标的,但是雷达发射探测波束肯定是基于极坐标的。所以模拟雷达探测包络的时候应该将数据点转化为极坐标。
极坐标线性插值
直角坐标系下的线性插值很简单:
\[y = y_1 + (x - x_1) * \frac{y_2 - y_1}{x_2 - x_1}\]但是极坐标下怎么做还没有转过弯来。 最开始的想法是通过三角函数将极坐标参数转化为直角坐标,进行线性插值后再反转回去,但是后来比较复杂,而且一想不对,那样做插值出来点与点之间不还是直线吗,那直接在直角坐标下做就完了,干嘛还费事地进行两次坐标转换呢。而且线性插值应该指的是对参数的线性化表示,所以,如法炮制:
\[r = r_1 + (\theta - \theta_1) * \frac{r_2 - r_1}{\theta_2 - \theta_1}\]这样出来的点与点之间的图形不是直线,而是一条类似螺旋曲线性质的曲线:
\[x = r * cos(\theta), y = r * sin(\theta)\]$r$与$\theta$是线性增长的关系,但是转换到直角坐标系下,$y$与$x$就不是了。
全局坐标与局部坐标转换
这个问题是由地球曲率引申出来的。 在雷达的局部坐标系下,由于地球曲率的影响,在雷达探测范围400km以外的地方大概10km的离地高度计算雷达包络是可以探测到的,但是实际是探测不到的。有一个近似公式:
\[L_{distance} = 4120 * (\sqrt{h_{radar}} + \sqrt{h_{target}})\]其中$h_{target}$为目标的离地高度,$h_{radar}$为雷达的离地高度,$L_{distance}$为目标与雷达距离。 所以400km外差不多10km高是探测不到的,故应该考虑将探测目标的全局坐标转化为雷达的局部坐标。
//Radar.cpp
bool Radar::Detect( PlanePtr Target )
{
bool IsTargetDetected = false;
if (Target->GetIdentification() == GetEntity()->GetIdentification())
{
continue;
}
Vector3d TargetPosition = Target->GetPosition();
Vector3d SensorPosition = GetBSE()->GetPosition();
Vector3d TargetSensorVec = TargetPosition - SensorPosition;
// transform coordinate from global to local
Matrix4d SensorRotateMatrix;
Conversion::ECEF2BodyMatrix(SensorPosition, Vector3d(1, 0, 0), SensorRotateMatrix);
Vector3d TargetInSensorCoor = TargetSensorVec * SensorRotateMatrix;
double TargetPosition_X = sqrt(TargetInSensorCoor.x*TargetInSensorCoor.x + TargetInSensorCoor.y*TargetInSensorCoor.y);
double TargetPosition_Y = TargetInSensorCoor.z;
double Target_theta = atan(TargetPosition_Y / TargetPosition_X);
double Target_r = sqrt(TargetPosition_X*TargetPosition_X + TargetPosition_Y*TargetPosition_Y);
size_t VecSize = _ParamVec.size();
for (size_t i = VecSize-1; i > 0; i--)
{
TableModelParams point_1 = _ParamVec.at(i);
TableModelParams point_2 = _ParamVec.at(i-1);
double theta_1 = atan(point_1.CoordinateY / point_1.CoordinateX);
double r_1 = 1000 * sqrt(point_1.CoordinateX*point_1.CoordinateX + point_1.CoordinateY*point_1.CoordinateY);
double theta_2 = atan(point_2.CoordinateY / point_2.CoordinateX);
double r_2 = 1000 * sqrt(point_2.CoordinateX*point_2.CoordinateX + point_2.CoordinateY*point_2.CoordinateY);
if (theta_1 < Target_theta && Target_theta < theta_2)
{
// linear interpolation
double r = r_1 + (Target_theta - theta_1) * (r_2 - r_1) / (theta_2 - theta_1);
if (r >= Target_r)
{
IsTargetDetected = true;
break;
}
else
{
IsTargetDetected = false;
break;
}
}
}
return IsTargetDetected;
}
2. osg绘制
创建三维画笔与基本配置信息:
// RadarPainter.cpp
void RadarPainter::CreateGrid()
{
_p->_rotateCount++;
double range = _p->_Sensor->Data()->GetMaxRange();
float detectInterval = _p->_Sensor->GetDetectInterval().total_seconds();
double azimuthFOVAngle = _p->_Sensor->GetFOVParameters()->_AzimuthFOVAngle;
azimuthFOVAngle = osg::RadiansToDegrees(azimuthFOVAngle);
double elevationFOVAngle = _p->_Sensor->GetFOVParameters()->_ElevationFOVAngle;
elevationFOVAngle = osg::RadiansToDegrees(elevationFOVAngle);
double offCenterAngle = _p->_Sensor->GetFOVParameters()->_OffCenterAngle;
offCenterAngle = osg::RadiansToDegrees(offCenterAngle);
float azimuthPointAngle = _p->_Sensor->GetAntennaPoint()->_AzimuthPointAngle;
azimuthPointAngle = osg::RadiansToDegrees(azimuthPointAngle);
float elevationPointAngle = _p->_Sensor->GetAntennaPoint()->_ElevationPointAngle;
elevationPointAngle = osg::RadiansToDegrees(elevationPointAngle);
double vStartAngle = -elevationFOVAngle*0.5 + elevationPointAngle;
if (vStartAngle > 90.0)
vStartAngle = 90.0;
if (vStartAngle < -90.0)
vStartAngle = -90.0;
double vEndAngle = elevationFOVAngle*0.5 + elevationPointAngle;
if (vEndAngle > 90.0)
vEndAngle = 90.0;
if (vEndAngle < -90.0)
vEndAngle = -90.0;
if(_p->_Sensor->GetFOVParameters()->_FOVType == FOVType::Rectangle)
{
float hStartAngle = -azimuthFOVAngle*0.5 + 90.0 - azimuthPointAngle;
float hEndAngle = azimuthFOVAngle*0.5 + 90.0 - azimuthPointAngle;
float hStartAngle2 = hEndAngle - 10.0;
float hEndAngle2 = hEndAngle;
float widthAngle = 10.0;
float scanAngle = hEndAngle - hStartAngle;
//cycle scan in angle range
int scanIndex = (int)(scanAngle);
int rotIndex = 0;
if (_p->_rotateCount > scanIndex)
{
_p->_rotateCount = 0;
}
osg::Vec4d lineColor(1.0,0.0,0.0,0.2);
osg::Vec4d gridColor(1.0,0.0,0.0,0.2);
osg::Vec4d scanColor(0.2,1.0,1.0,0.1);
osg::ref_ptr<RadarNode> RadarNode = new RadarNode(_p->_rotateCount,range,_p->_Sensor->GetParamVec(),SensorType::Sector,
scanAngle,hStartAngle,hEndAngle,hStartAngle2,hEndAngle2,vStartAngle,vEndAngle,widthAngle,lineColor,gridColor,scanColor);
_p->_Root->addChild(RadarNode.get());
}
else if(_p->_Sensor->GetFOVParameters()->_FOVType == FOVType::Circle)
{
float hStartAngle = -offCenterAngle + 90.0 - azimuthPointAngle;
float hEndAngle = offCenterAngle + 90.0 - azimuthPointAngle;
float hStartAngle2 = hEndAngle - 10.0;
float hEndAngle2 = hEndAngle;
float widthAngle = 10.0;
float scanAngle = hEndAngle - hStartAngle;
//cycle scan in angle range
int scanIndex = (int)(scanAngle);
int rotIndex = 0;
if (_p->_rotateCount > scanIndex)
{
_p->_rotateCount = 0;
}
osg::Vec4d lineColor(1.0,0.0,0.0,0.3);
osg::Vec4d gridColor(1.0,0.0,0.0,0.3);
osg::Vec4d scanColor(0.2,1.0,1.0,0.2);
osg::ref_ptr<RadarNode> RadarNode = new RadarNode(_p->_rotateCount,range,_p->_Sensor->GetParamVec(),SensorType::Sector,
scanAngle,hStartAngle,hEndAngle,hStartAngle2,hEndAngle2,vStartAngle,vEndAngle,widthAngle,lineColor,gridColor,scanColor);
_p->_Root->addChild(RadarNode.get());
}
if (GetElement())
{
osg::Matrixd mat;
TSVector3d pos = GetElement()->GetLLAPosition();
_p->_Ellipsoid->computeLocalToWorldTransformFromLatLongHeight(
osg::DegreesToRadians(pos.y), osg::DegreesToRadians(pos.x), pos.z, mat);
if(_p->_Sensor->GetAntennaPoint()->_AntennaPointMode == PointMode::Relative)
{
osg::Vec3d hpr(GetBSE()->GetHeading(), GetBSE()->GetPitch(), GetBSE()->GetRoll());
osg::Vec3 x(1.0, 0.0, 0.0), y(0.0, 1.0, 0.0), z(0.0, 0.0, 1.0);
osg::Quat quat(-hpr[1], x, hpr[2], y, -hpr[0], z);
_p->_Root->setMatrix(osg::Matrix::rotate(quat)*mat);
}
else
{
_p->_Root->setMatrix(mat);
}
}
}
雷达包络
//RadarNode.h
#ifndef RADARNODE_H
#define RADARNODE_H
#include "BotomTriangleNode.h"
#include "PulseConeNode.h"
#include "SectorNode.h"
#include <osg/Group>
#include <osg/Timer>
enum SensorType
{
Triangle,
Sector,
Cone
};
class SensorCallBack : public osg::NodeCallback
{
public:
SensorCallBack(osg::Vec3d scanScle);
~SensorCallBack();
virtual void operator()(osg::Node* node, osg::NodeVisitor* nv);
void SetPlay(bool play);
void SetPlayRate(int playRate);
private:
int _Count;
int _PlayRate;
bool _Play;
osg::Vec3d _ScanScale;
osg::Timer_t _CurrentTime;
};
class RadarNode : public osg::MatrixTransform
{
public:
////////////////////////////////////////////////////////////////////////////////////////////////////
/// <summary> Constructor. </summary>
///
/// <remarks> zhuojiaoshou, 2019/10/11. </remarks>
///
/// <param name="rotateCount"> Number of rotates.旋转计数(用于绘制扫描) </param>
/// <param name="range"> The range.雷达半径 </param>
/// <param name="table_param"> A variable-length parameters list containing table parameter.雷达包络剖面 </param>
/// <param name="type"> The type.探测类型 </param>
/// <param name="scanAngle"> The scan angle.平面扇形角度 </param>
/// <param name="hStartAngle"> The start angle. </param>
/// <param name="hEndAngle"> The end angle. </param>
/// <param name="hStartAngle2"> The start angle 2. </param>
/// <param name="hEndAngle2"> The end angle 2. </param>
/// <param name="vStartAngle"> The v start angle. </param>
/// <param name="vEndAngle"> The v end angle. </param>
/// <param name="widthAngle"> The width angle. </param>
/// <param name="color"> The color.边线颜色 </param>
/// <param name="gridColor"> The grid color.网格颜色 </param>
/// <param name="scanColor"> The scan color.扇形颜色 </param>
////////////////////////////////////////////////////////////////////////////////////////////////////
RadarNode(int rotateCount,double range, RadarTableParamsVec table_param, SensorType type, double scanAngle,float hStartAngle, float hEndAngle, float hStartAngle2, float hEndAngle2,
float vStartAngle, float vEndAngle, float widthAngle, const osg::Vec4d& color, const osg::Vec4d& gridColor, const osg::Vec4d& scanColor );
~RadarNode();
void SetPlay(bool play);
void SetPlayRate(int playRate);
void SetColor(const osg::Vec4d& color);
void SetTableParam(RadarTableParamsVec table_param);
private:
////////////////////////////////////////////////////////////////////////////////////////////////////
/// <summary> Creates a radar envelope. </summary>
///
/// <remarks> zhuojiaoshou, 2019/10/12. </remarks>
///
/// <param name="range"> The range. </param>
/// <param name="hStartAngle"> The start angle. </param>
/// <param name="hEndAngle"> The end angle. </param>
/// <param name="vStartAngle"> The v start angle. </param>
/// <param name="vEndAngle"> The v end angle. </param>
/// <param name="color"> The color. </param>
/// <param name="gridColor"> The grid color. </param>
///
/// <returns> . </returns>
////////////////////////////////////////////////////////////////////////////////////////////////////
osg::ref_ptr<osg::Geode> CreateRadarEnvelope(double range, float hStartAngle, float hEndAngle, float vStartAngle, float vEndAngle, const osg::Vec4d& color, const osg::Vec4d& gridColor);
private:
osg::ref_ptr<BotomTriangleNode> _BotomTriangleNode;
osg::ref_ptr<SectorNode> _SectorNode;
osg::ref_ptr<PulseConeNode> _PlauseNode;
osg::Vec3d _ScanScale;
RadarTableParamsVec _Table_Param;
};
#endif //RADARNODE_H
//RadarNode.cpp
#include "stdAfx.h"
#include "RadarNode.h"
#include <osg/Geode>
#include <osg/Geometry>
#include <osg/Depth>
#include <osg/MatrixTransform>
SensorCallBack::SensorCallBack(osg::Vec3d scanScale)
{
_Count = 0;
_PlayRate = 1;
_Play = false;
_ScanScale = scanScale;
_CurrentTime = osg::Timer::instance()->tick();
}
SensorCallBack::~SensorCallBack()
{
}
void SensorCallBack::SetPlay(bool play)
{
_Play = play;
}
void SensorCallBack::operator()(osg::Node* node, osg::NodeVisitor* nv)
{
if (nv->getVisitorType() == osg::NodeVisitor::UPDATE_VISITOR && nv->getFrameStamp() )
{
float t = osg::Timer::instance()->delta_s(_CurrentTime, osg::Timer::instance()->tick());
if(t < 0.25 || !_Play)
{
traverse(node, nv);
return ;
}
_CurrentTime = osg::Timer::instance()->tick();
osg::ref_ptr<osg::MatrixTransform> mt = dynamic_cast<osg::MatrixTransform*>(node);
if (mt.valid())
{
osg::Matrixd mat;;
mat.makeRotate(osg::DegreesToRadians((double)(_Count)), osg::Vec3d(0.0, 0.0, 1.0));
mt->setMatrix(mat*osg::Matrix::scale(_ScanScale));
}
_Count = _Count+_PlayRate;
if(_Count >= 359)
{
_Count = 0;
}
}
traverse(node, nv);
}
void SensorCallBack::SetPlayRate( int playRate )
{
if(playRate>20)
{
playRate =10;
}
else if (playRate <1)
{
playRate =1 ;
}
_PlayRate = playRate;
}
RadarNode::RadarNode( int rotateCount, double range, RadarTableParamsVec table_param, SensorType type, double scanAngle,float hStartAngle, float hEndAngle ,float hStartAngle2, float hEndAngle2, float vStartAngle,float vEndAngle, float widthAngle, const osg::Vec4d& lineColor, const osg::Vec4d& gridColor, const osg::Vec4d& scanColor )
{
_ScanScale = osg::Vec3d(1,1,range/range);//high
osg::ref_ptr<osg::MatrixTransform> mt = new osg::MatrixTransform;
switch(type)
{
case SensorType::Triangle:
{
_BotomTriangleNode = new BotomTriangleNode(range,30,scanColor);
_BotomTriangleNode->setMatrix(osg::Matrix::rotate(osg::DegreesToRadians(scanAngle),osg::Y_AXIS)*osg::Matrix::rotate(0,osg::X_AXIS));
mt->setMatrix(osg::Matrix::scale(_ScanScale));
mt->addChild(_BotomTriangleNode);
}
break;
case SensorType::Cone:
{
_PlauseNode = new PulseConeNode(range,range*0.2,scanColor);//high
_PlauseNode->setMatrix(osg::Matrix::rotate(-scanAngle,osg::X_AXIS));
mt->addChild(_PlauseNode);
}
break;
case SensorType::Sector:
{
osg::Vec4d scanLineColor(0.0,1.0,0.0,0.5);
_SectorNode = new SectorNode(rotateCount,range,table_param,hStartAngle,hEndAngle,vStartAngle,vEndAngle,widthAngle,scanLineColor);
mt->addChild(_SectorNode);
}
break;
}
this->SetTableParam(table_param);
this->addChild(mt.get());
this->addChild(CreateRadarEnvelope(range, hStartAngle, hEndAngle, vStartAngle, vEndAngle, lineColor, gridColor));
mt->setUpdateCallback(new SensorCallBack(_ScanScale));
this->getOrCreateStateSet()->setMode(GL_LIGHTING, osg::StateAttribute::OFF);
this->getOrCreateStateSet()->setMode(GL_DEPTH_TEST, osg::StateAttribute::ON);
this->getOrCreateStateSet()->setMode(GL_BLEND, osg::StateAttribute::ON);
this->getOrCreateStateSet()->setRenderBinDetails(6, "RenderBin");
}
RadarNode::~RadarNode()
{
}
osg::ref_ptr<osg::Geode> RadarNode::CreateRadarEnvelope( double range, float hStartAngle, float hEndAngle, float vStartAngle, float vEndAngle, const osg::Vec4d& lineColor, const osg::Vec4d& gridColor )
{
osg::ref_ptr<osg::Geode> geode = new osg::Geode;
geode->setDataVariance(osg::Object::DYNAMIC);
osg::ref_ptr<osg::Geometry> geometry = new osg::Geometry;
geometry->setDataVariance(osg::Object::DYNAMIC);
geometry->setUseDisplayList(false);
geometry->setUseVertexBufferObjects(true);
osg::ref_ptr<osg::Vec3Array> vertices = new osg::Vec3Array;
double dtH = 5.00;
double dtV = 5.00;
int hNum = (hEndAngle - hStartAngle) / dtH + 1;
int vNum = _Table_Param.size();
hStartAngle = int(hStartAngle/dtH) * dtH;
vStartAngle = int(vStartAngle/dtV) * dtV;
double radius, x, y, z;
for (int i = 0; i < vNum; i++)
{
for (int j = 0; j < hNum; j++)
{
x = 1000 * _Table_Param.at(i).CoordinateX * cos(osg::DegreesToRadians(j*dtH));
y = 1000 * _Table_Param.at(i).CoordinateX * sin(osg::DegreesToRadians(j*dtH));
z = 1000 * _Table_Param.at(i).CoordinateY;
vertices->push_back(osg::Vec3d(x, y, z));
}
}
geometry->setVertexArray(vertices.get());
osg::ref_ptr<osg::Vec4Array> colors = new osg::Vec4Array;
geometry->setColorArray(colors.get());
geometry->setColorBinding(osg::Geometry::BIND_PER_PRIMITIVE_SET);
osg::StateSet* stateSet = geometry->getOrCreateStateSet();
stateSet->setMode(GL_BLEND,true);
stateSet->setMode(GL_LIGHTING,false);
//entity sheltered from sensor
osg::Depth *depth = new osg::Depth;
depth->setWriteMask(false);
geode->getOrCreateStateSet()->setAttributeAndModes(depth,osg::StateAttribute::ON);
//vertical line
for (int i = 0; i < vNum; i+=2)
{
geometry->addPrimitiveSet( new osg::DrawArrays(osg::PrimitiveSet::LINE_STRIP, i*hNum, hNum));
colors->push_back(lineColor);
}
//horizontal line
for (int i = 0; i < hNum; i+=2)
{
osg::ref_ptr<osg::DrawElementsUInt> lineStripeGrid = new osg::DrawElementsUInt(osg::PrimitiveSet::LINE_STRIP);
for (int j = 0; j < vNum; j+=2)
{
lineStripeGrid->push_back(i + j*hNum);
}
lineStripeGrid->push_back(vertices->size());
geometry->addPrimitiveSet(lineStripeGrid);
colors->push_back(lineColor);
}
colors->push_back(gridColor);
osg::ref_ptr<osg::DrawElementsUInt> primitives = new osg::DrawElementsUInt(GL_QUADS);
for(int row=0;row<vNum-1;++row)
{
for(int col=0;col<hNum-1;++col)
{
primitives->push_back(col +(row+1)*hNum);
primitives->push_back(col +row*hNum);
primitives->push_back((col+1)+row*hNum);
primitives->push_back((col+1)+(row+1)*hNum);
}
}
geometry->addPrimitiveSet(primitives);
geode->addDrawable(geometry.get());
return geode;
}
void RadarNode::SetPlay( bool play )
{
SensorCallBack* xkzCallback = dynamic_cast<SensorCallBack*>(this->getChild(0)->getUpdateCallback());
if(xkzCallback)
{
xkzCallback->SetPlay(play);
}
}
void RadarNode::SetPlayRate( int playRate )
{
SensorCallBack* xkzCallback = dynamic_cast<SensorCallBack*>(this->getChild(0)->getUpdateCallback());
if(xkzCallback)
{
xkzCallback->SetPlayRate(playRate);
}
}
void RadarNode::SetColor( const osg::Vec4d& color )
{
if (this->getNumChildren() == 2)
{
if(osg::Geode* geode = dynamic_cast<osg::Geode*>(this->getChild(1)))
{
osg::Geometry* geometry = dynamic_cast<osg::Geometry*>(geode->getDrawable(0));
if (!geometry)
{
return;
}
if(osg::Vec4Array* Colors = dynamic_cast<osg::Vec4Array*>(geometry->getColorArray()))
{
if (Colors->empty())
return;
osg::Vec4& endColor = Colors->at(Colors->size()-1);
endColor.set(color.r(), color.g(), color.b(), endColor.a());
Colors->dirty();
}
}
}
}
void RadarNode::SetTableParam( RadarTableParamsVec table_param )
{
_Table_Param.clear();
_Table_Param.assign(table_param.begin(),table_param.end());
}
扫描截面
//SectorNode.h
#ifndef SECTORNODE_H_
#define SECTORNODE_H_
#include <osg/Group>
#include <osg/MatrixTransform>
#include <osg/Geode>
#include <osg/Geometry>
class SectorNode :public osg::MatrixTransform
{
public:
class RotateCallBack :public osg::NodeCallback
{
public:
RotateCallBack(osg::Vec3d axis, double rotAngular)
:_axis(axis),_speed(rotAngular),_currentRotation(0.0)
{
}
virtual void operator()(osg::Node *node, osg::NodeVisitor *nv)
{
osg::MatrixTransform * mt = dynamic_cast<osg::MatrixTransform*>(node);
if (mt)
{
_currentRotation += _speed;
if (_currentRotation >( 2 * osg::PI ))
{
_currentRotation -= (osg::PI * 2);
}
osg::Quat rotQuat(_currentRotation, _axis);
osg::Matrix rotMatrix(rotQuat);
mt->setMatrix(rotMatrix);
}
osg::NodeCallback::traverse(node, nv);
}
protected:
osg::Vec3d _axis;
double _speed;
double _currentRotation;
};
public:
SectorNode(int roateCount, float radius, RadarTableParamsVec table_param, float hStartAngle, float hEndAngle, float vStartAngle, float vEndAngle, float angle, osg::Vec4d color);
~SectorNode();
private:
void RenderGeometryShader(osg::ref_ptr<osg::Geometry> &geomtry,int quadSize);
private:
osg::ref_ptr<osg::MatrixTransform> _mat;
int _index;
};
#endif //SECTORNODE_H
//SectorNode.cpp
#include "stdafx.h"
#include "SectorNode.h"
#pragma push_macro("CP")
#undef CP
#include <osg/LineWidth>
#include <osg/Depth>
#include <osgDB/ReadFile>
#pragma pop_macro("CP")
SectorNode::SectorNode( int roateCount, float radius, RadarTableParamsVec table_param, float hStartAngle, float hEndAngle, float vStartAngle, float vEndAngle, float angle, osg::Vec4d color )
{
this->getOrCreateStateSet()->setMode(GL_LIGHTING,false);
osg::ref_ptr<osg::Geode> geode = new osg::Geode;
_mat = new osg::MatrixTransform;
_mat->addChild(geode);
this->addChild(_mat);
osg::ref_ptr<osg::Geometry> flankgeom = new osg::Geometry();
osg::ref_ptr<osg::Vec3Array> vt = new osg::Vec3Array;
float dt = osg::PI/180.0;
float x,y,z;
float R = radius*0.98;
int num = angle / dt;
if (hStartAngle > 0)
{
if ((roateCount < hStartAngle) || (roateCount > hEndAngle))
{
return;
}
}
else if (((roateCount) >= hEndAngle) &&(roateCount) <(360.0 + hStartAngle))
{
return;
}
double dtH = 1.00;
double dtV = 1.00;
int hNum = 2;
int vNum = table_param.size();
//flank
for (int i = 0; i < vNum; i++)
{
x = 1000 * table_param.at(i).CoordinateX * cos(osg::DegreesToRadians(roateCount*dtH));
y = 1000 * table_param.at(i).CoordinateX * sin(osg::DegreesToRadians(roateCount*dtH));
z = 1000 * table_param.at(i).CoordinateY;
vt->push_back(osg::Vec3d(x, y, z));
}
flankgeom->setVertexArray(vt);
osg::Vec4Array* vc = new osg::Vec4Array;
vc->push_back(color);
flankgeom->setColorArray(vc);
flankgeom->setColorBinding(osg::Geometry::BIND_OVERALL);
flankgeom->addPrimitiveSet(new osg::DrawArrays(GL_TRIANGLE_FAN,0,vt->size()));
geode->addDrawable(flankgeom.get());
//topface
osg::ref_ptr<osg::Geometry> topfacegeom = new osg::Geometry;
osg::Vec3Array *topvt = new osg::Vec3Array;
float m,n, x2,y2, m2,n2, z2;
for (int i = 0; i < hNum; i++)
{
for (int j = 0; j < vNum-1; j++)
{
x = 1000 * table_param.at(j).CoordinateX * cos(osg::DegreesToRadians((roateCount-angle*i)*dtH));
y = 1000 * table_param.at(j).CoordinateX * sin(osg::DegreesToRadians((roateCount-angle*i)*dtH));
m = 1000 * table_param.at(j).CoordinateX * cos(osg::DegreesToRadians((roateCount-angle*(i+1))*dtH));
n = 1000 * table_param.at(j).CoordinateX * sin(osg::DegreesToRadians((roateCount-angle*(i+1))*dtH));
z = 1000 * table_param.at(j).CoordinateY;
x2 = 1000 * table_param.at(j+1).CoordinateX * cos(osg::DegreesToRadians((roateCount-angle*i)*dtH));
y2 = 1000 * table_param.at(j+1).CoordinateX * sin(osg::DegreesToRadians((roateCount-angle*i)*dtH));
m2 = 1000 * table_param.at(j+1).CoordinateX * cos(osg::DegreesToRadians((roateCount-angle*(i+1))*dtH));
n2 = 1000 * table_param.at(j+1).CoordinateX * sin(osg::DegreesToRadians((roateCount-angle*(i+1))*dtH));
z2 = 1000 * table_param.at(j+1).CoordinateY;
topvt->push_back(osg::Vec3d(x,y,z));
topvt->push_back(osg::Vec3d(m,n,z));
topvt->push_back(osg::Vec3d(x2,y2,z2));
topvt->push_back(osg::Vec3d(m2,n2,z2));
}
}
topfacegeom->setVertexArray(topvt);
osg::Vec4Array* gd = new osg::Vec4Array;
for (int i = 0; i < topvt->size(); i++)
{
if (i < (topvt->size() / 2))
{
if (i % 2 == 0)
{
gd->push_back(color);
}
else
{
gd->push_back(osg::Vec4(0.5,1.0,0.0,0.1));
}
}
else
{
if (i % 2 == 0)
{
gd->push_back(osg::Vec4(0.5,1.0,0.0,0.1));
}
else
{
gd->push_back(osg::Vec4(1.0,1.0,0.0,0.0));
}
}
}
topfacegeom->setColorArray(gd);
topfacegeom->setColorBinding(osg::Geometry::BIND_PER_VERTEX);
topfacegeom->addPrimitiveSet(new osg::DrawArrays(GL_QUAD_STRIP,0,topvt->size()));
RenderGeometryShader(topfacegeom,vNum);
geode->addDrawable(topfacegeom.get());
//entity sheltered from sensor
osg::Depth *depth = new osg::Depth;
depth->setWriteMask(false);
geode->getOrCreateStateSet()->setAttributeAndModes(depth,osg::StateAttribute::ON);
}
SectorNode::~SectorNode()
{
}
void SectorNode::RenderGeometryShader( osg::ref_ptr<osg::Geometry>& geomtry,int quadSize )
{
if (!geomtry)
{
return;
}
osg::StateSet * stateSet = geomtry->getOrCreateStateSet();
stateSet->setMode(GL_BLEND,true);
stateSet->setMode(GL_DEPTH_TEST,true);
stateSet->setMode(GL_LIGHTING,false);
osg::ref_ptr<osg::DrawElementsUInt> primitives = new osg::DrawElementsUInt(GL_QUAD_STRIP);
for (int i = 0; i < quadSize; i++)
{
primitives->push_back(2*i);
primitives->push_back((2*i)+1);
primitives->push_back((2*i)+2);
primitives->push_back((2*i)+3);
}
geomtry->addPrimitiveSet(primitives);
}
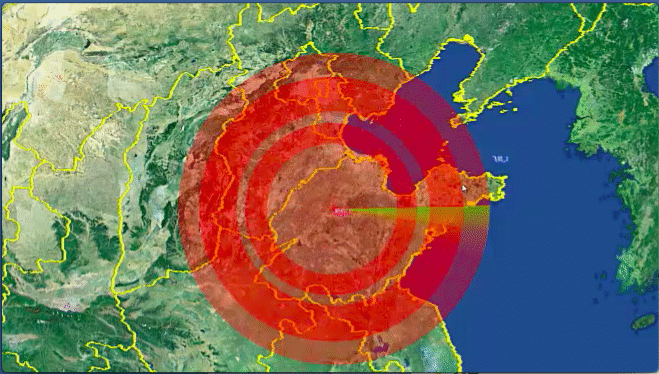
最终实现动态效果如下:
如果有收获,可以请我喝杯咖啡!
